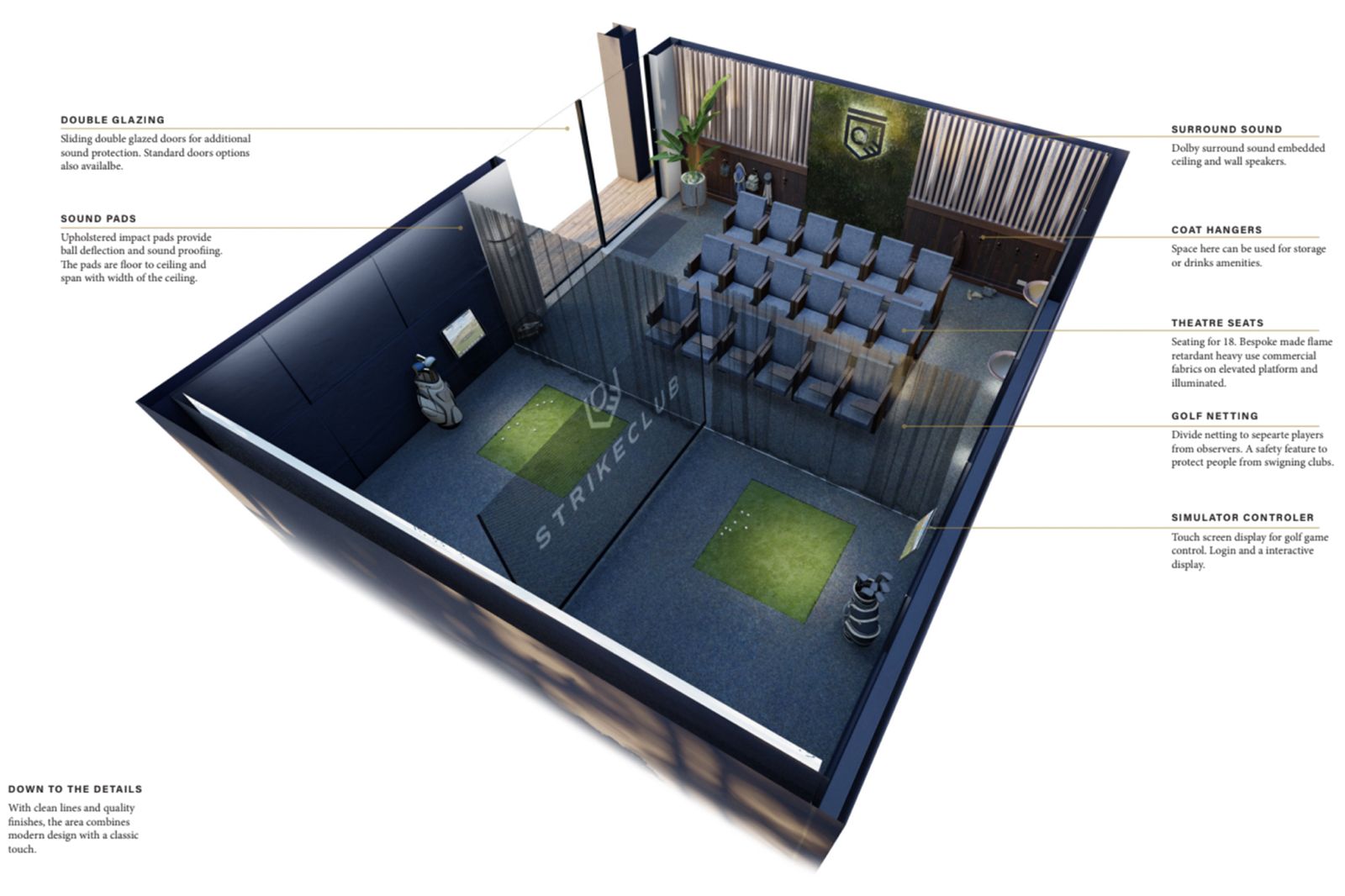
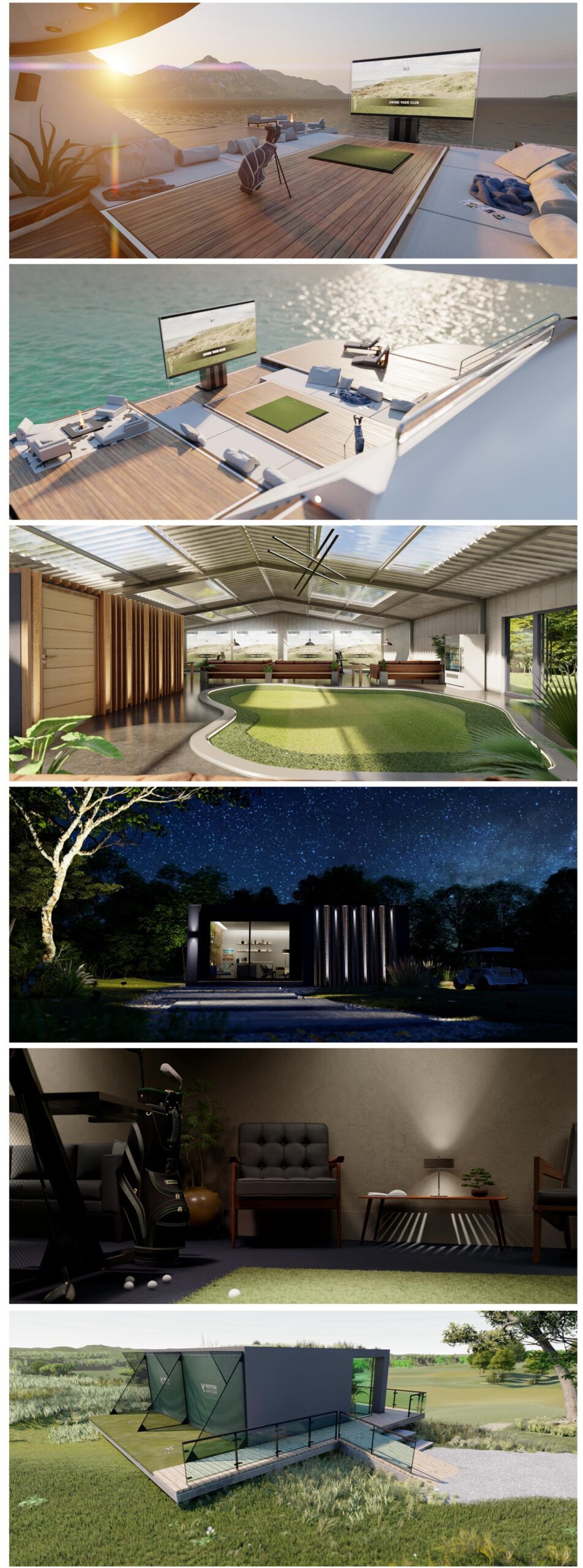
As Design Director at StrikeClub, an indoor golf entertainment company, I led the company vision and conceptual design. I delivered innovative product solutions that were engaging, functional, and visually striking, enhancing the user experience while aligning with the brand’s vibrant and recreational ethos.
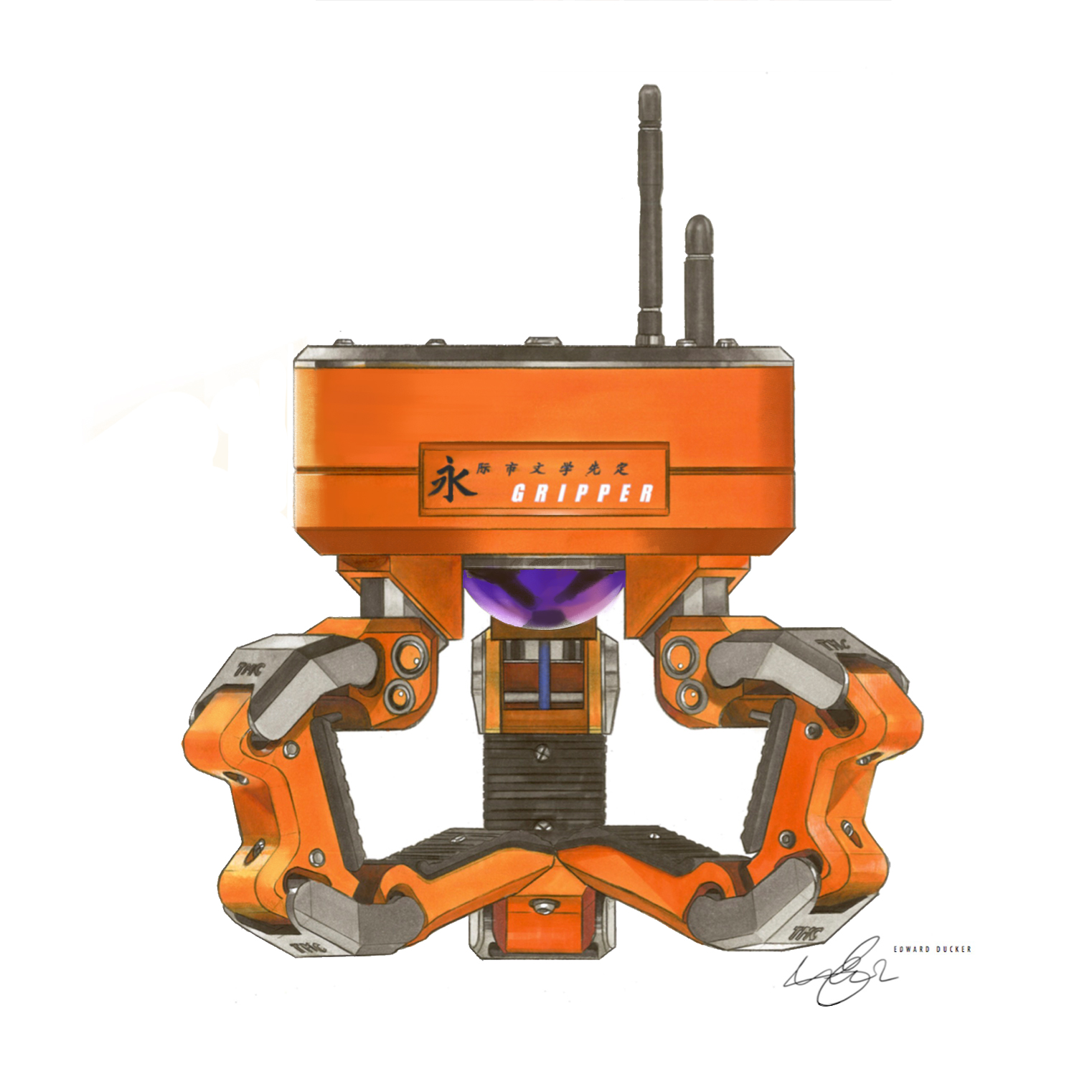
Open rov // under water gripper
Problem:
Physical manipulation of diverse geometric objects located in underwater environments up to sub sea levels of 100 metres.
Solution:
An remote controle under water gripper that is attachable to the subsea robot ‘openrov’, capable of full articulation, camera capture and deep sea pressure.