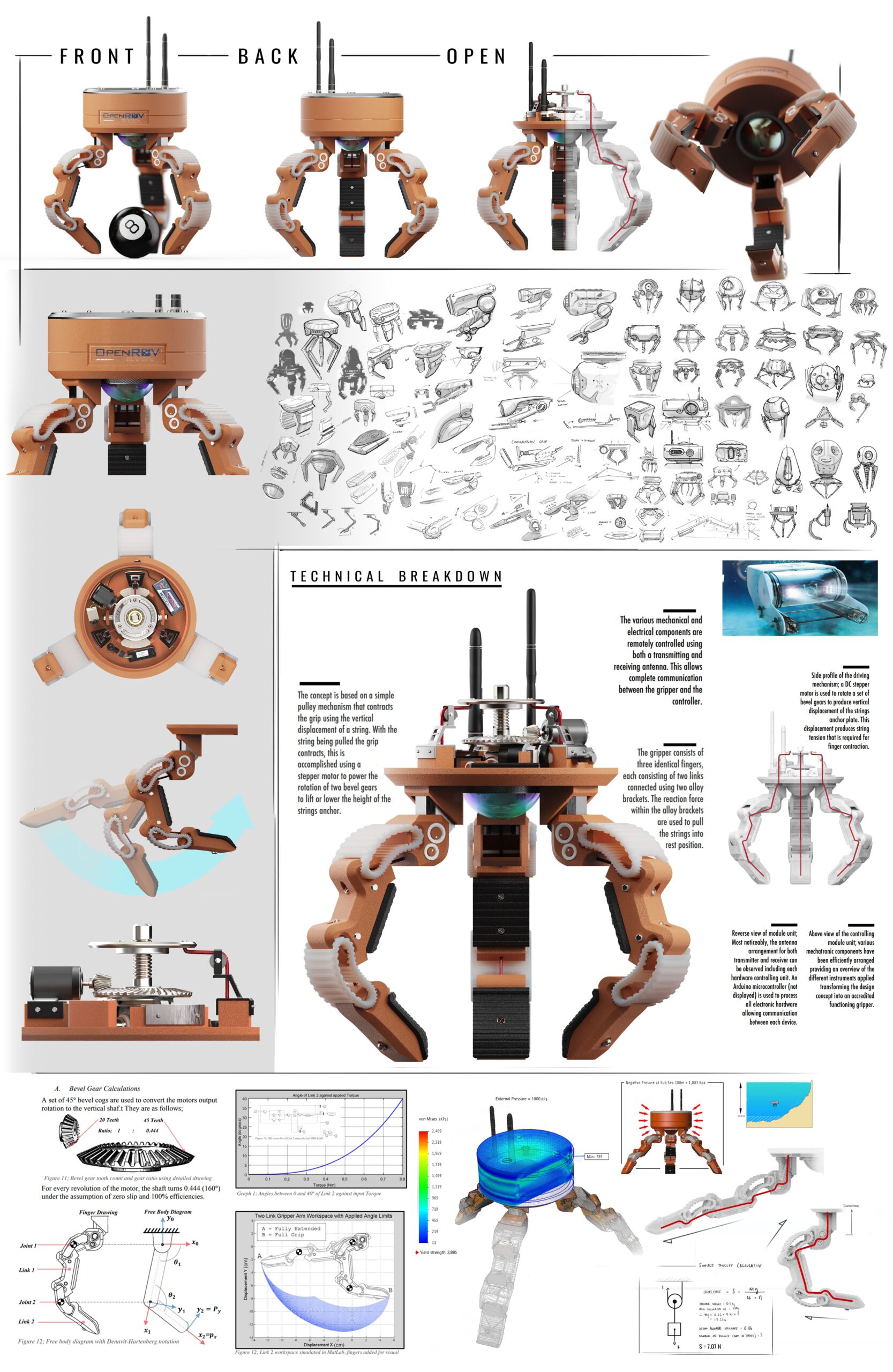
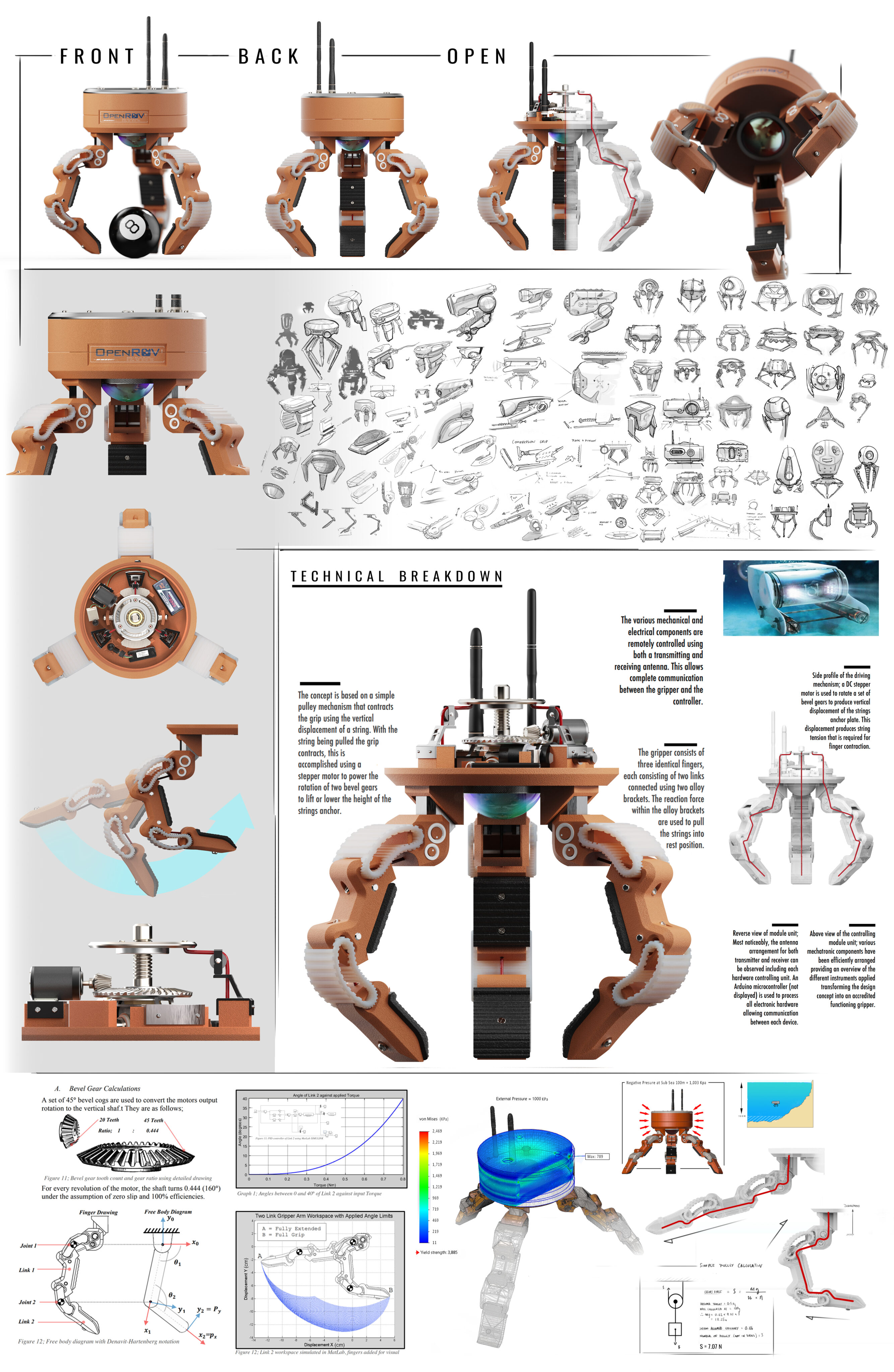
OpenROV required a robust robotic gripper to attach to their underwater drone, capable of operating at depths of up to 100 metres.
Solution:
The design of a compact, high-strength gripper using advanced materials suited for deep-sea exploration. Computational analysis was employed to optimise the gripper’s kinematics and stress performance. The final design offered rc object manipulation, live video feedback and flexible kinematics, seamlessly integrating with the ROV.
Open rov // under water gripper
Problem:
Physical manipulation of diverse geometric objects located in underwater environments up to sub sea levels of 100 metres.
Solution:
An remote controle under water gripper that is attachable to the subsea robot ‘openrov’, capable of full articulation, camera capture and deep sea pressure.